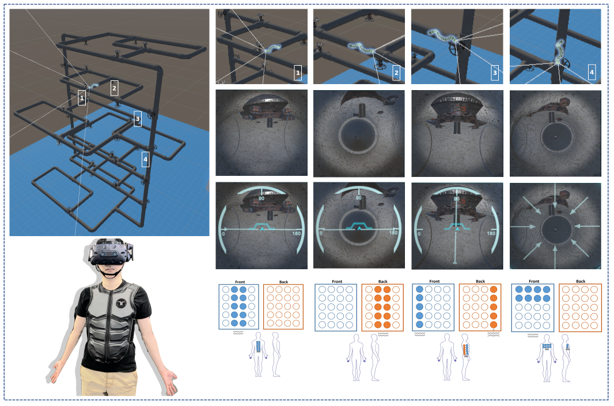
Upper-Body Haptic System for Snake Robot Teleoperation
Snake robots have shown a great potential for operations in confined workplaces that are less accessible or dangerous to human workers, such as in-pipe inspection. However, the snake robot teleoperation remains a nontrivial task due to the unique locomotion mechanism (e.g., helical motion) and the constraints of the workplaces including the low visibility and indistinguishable features. Most snake robot feedback systems are based on the live camera view only. It is hard for the human operator to develop a correct spatial understanding of the remote workplace, leading to problems such as disorientation and motion sickness in snake robot teleoperation. This study designs and evaluates an innovative haptic assistant system for snake robot teleoperation in the in-pipe inspection.
Zhu, Q., Zhou, T., Du, J. (2021). Upper‑Body Haptic System for Snake Robot Teleoperation in Pipelines. ELSEVIER Advanced Engineering Informatics. (Under 1st Review)