Shared Sensory Perception Between the Human Worker and the Robot
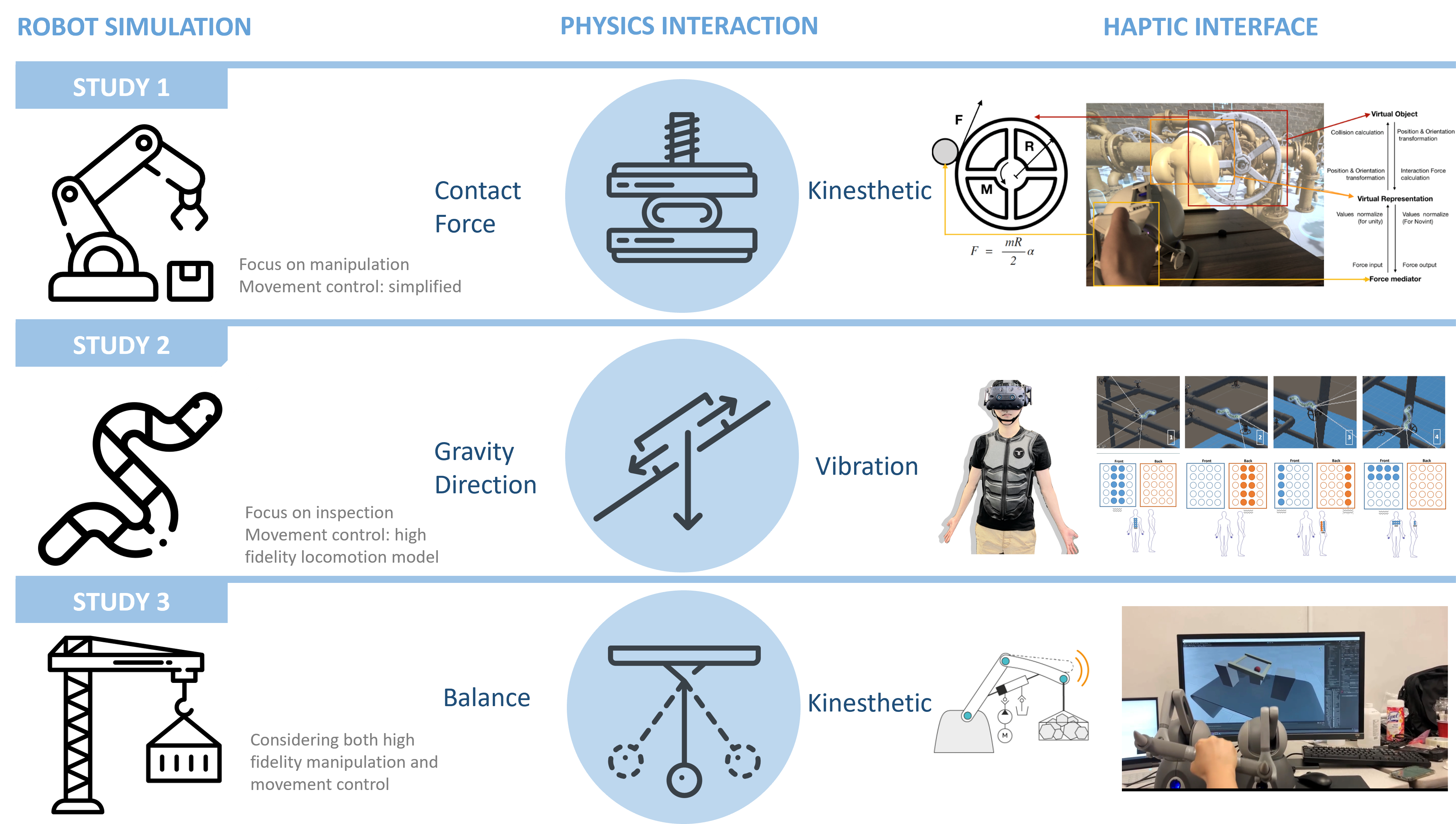
One of the significant barriers affecting the adoption of construction robots is the lack of effective HRI designs for dynamic construction tasks, given the complexity and variability of operational needs for human-construction robot collaboration in this area. Most existing HRI designs for robotic control feedback are mainly based on visual feedback (e.g., camera views), which can hardly help restore the awareness and accurate perception of the physical space and interaction for construction workers. Humans rely on multi-modal feedback to make a motor decision, i.e., the sensorimotor process. The haptics, i.e., the sensation of force and tactile, plays an essential role in granting construction workers the ability to learn and use motor controls in daily works. Therefore, I am testing various haptic interface for promoting the shared sensory perception between the human agents and the robot. The findings are expected to help construction workers control the robot in a more natural manner. Meanwhile, the perception of how construction workers manipulating and interacting with the environment can be transferred to robots and thus improves their automation algorithms. Our research in this area is currently funded by NASA and NSF.