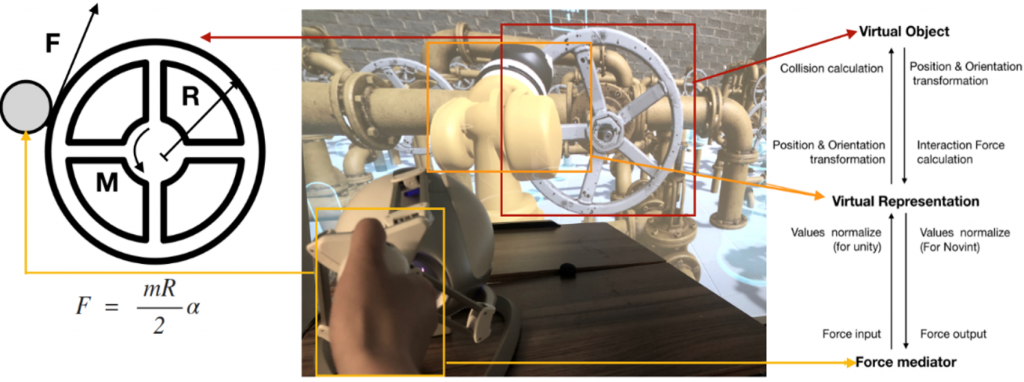
Force Simulator for Industrial Manipulators
Telerobotic operation, i.e., a human operator manipulating remote robotic systems at a distance, has started to gain popularity in the construction industry. It is expected to help tackle operational challenges in dynamic construction workplaces. The success of telerobotic operation builds on an effective design of the human-robot interface to provide human operators with necessary senses about the remote workplaces, involving multimodal sensory cues, such as visual, audio and haptic feedback. The force feedback design in the telerobotic control interface is of central interest and is becoming the main feature of the bilateral control system for teleoperation, as it helps provide feedback about heavy physical interactions and processes in typical construction operations. However, fundamental questions regarding the relationship between haptic feedback design and human perception of the physical systems and processes remain unanswered. Understanding the impact of haptic feedback on the perception and performance of telerobotic operators sets the foundation for optimizing the feedback system design to compensate for the physical capabilities of human workers and facilitate better and safer construction operations.