Topic 1 : Shared Sensory Perception Between the Human Worker and the Robot
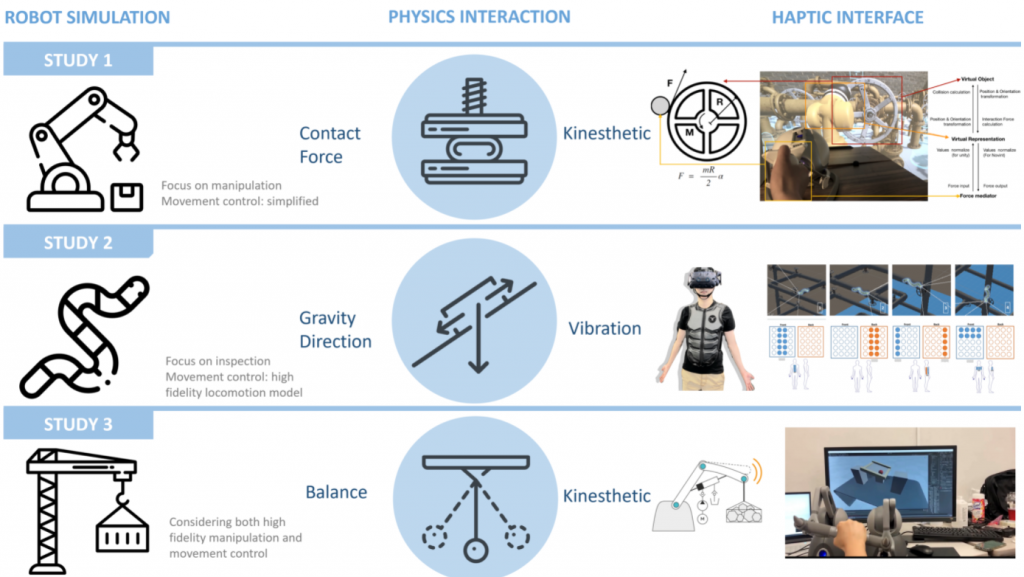
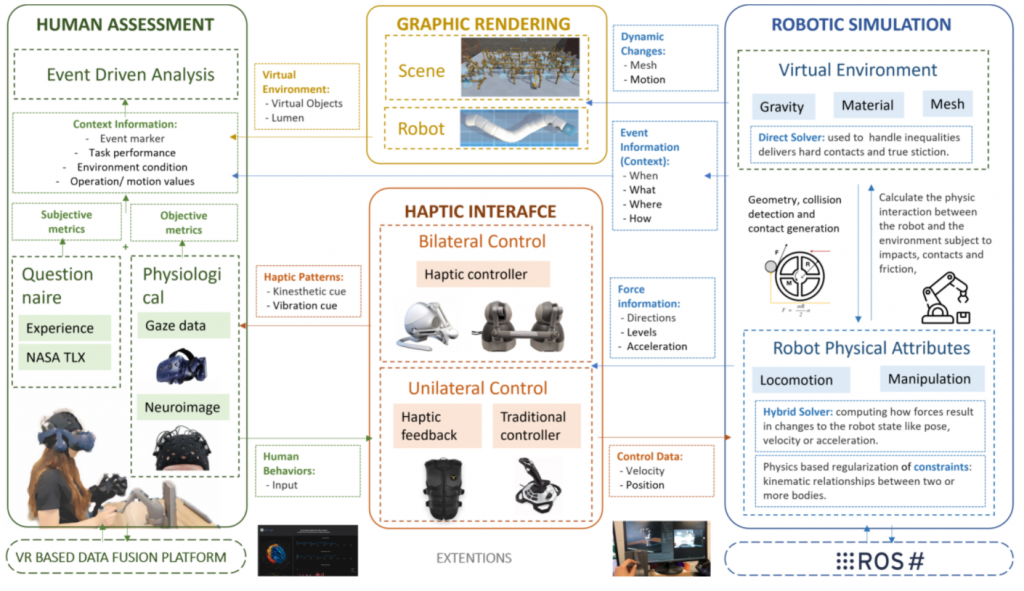
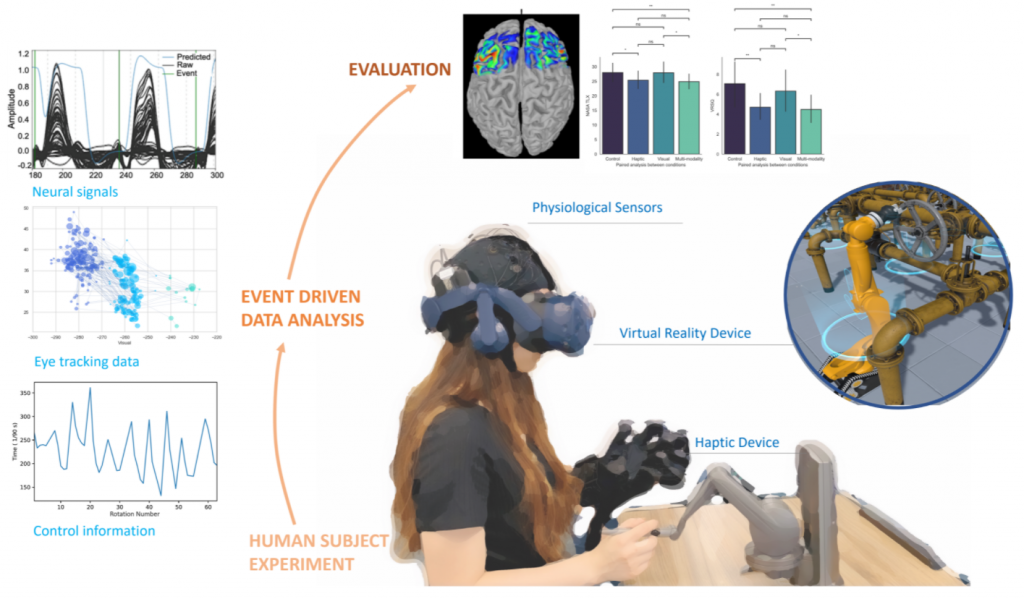
I am testing various haptic interfaces for promoting the shared sensory perception between the human agents and the robot. The findings are expected to help construction workers control the robot in a more natural manner. Meanwhile, the perception of how construction workers manipulating and interacting with the environment can be transferred to robots and thus improves their automation algorithms.
Topic 2: VR-Based Robotic Simulation
My research involves reconstructing the contextual environment that both humans and robots are involved in. To realize the digital twins of construction robots in the VR environment, I bridged the Robot Operating System (ROS) and the game engine (Unity). The inverse kinematic (IK) algorithms include interactive manipulation, animation control, and collision avoidance methods are applied via the Unity and the ROS, and are transferred to the real robots (e.g., robotic arms and quadrupedal robots) for further validation if required.
Topic 3: Human Factors Engineering for Augmented Cognitive and Physical Functions
I developed a real-time human behavior data analytics system that integrates neuroimaging, eye tracking, and motion analysis to achieve this goal. This system is embedded in a VR simulator and supports online visualization and computing (www.cogdna.com).